Introduction
Path planning is a fundamental aspect of autonomous robotics, enabling robots to move from a starting point to a goal safely and efficiently. Whether it’s a mobile robot navigating a warehouse or a drone flying through complex terrain, understanding path planning algorithms is crucial.
At Curiosity Tech in, beginners and professionals alike can access step-by-step tutorials, visual simulations, and project-based guidance for implementing these algorithms on real or simulated robots.
1. What is Path Planning?
Path planning is the process of computing a feasible route for a robot to reach its goal while avoiding obstacles and optimizing certain criteria such as time, energy, or distance.
Key Considerations:
- Obstacle Avoidance: Robots must detect and circumvent obstacles.
- Optimality: Shortest or least-cost path is preferred.
- Real-Time Capability: For dynamic environments, planning must be efficient.
- Constraints: Robot kinematics, dynamics, and workspace limitations.
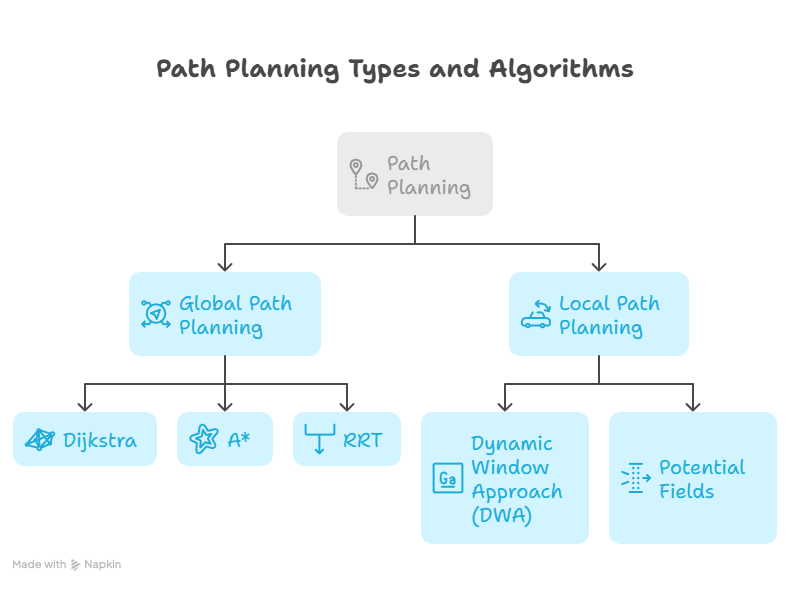
2. Types of Path Planning
Path planning algorithms are generally classified into Global Planning and Local Planning.
| Type | Description | Example Algorithms |
| Global Path Planning | Computes a complete path from start to goal using map data | Dijkstra, A*, RRT |
| Local Path Planning | Reacts to dynamic obstacles in real-time | Dynamic Window Approach (DWA), Potential Fields |
3. Popular Path Planning Algorithms
A. Dijkstra’s Algorithm
- Purpose: Finds the shortest path in a weighted graph.
- Use Case: Grid-based robots or map-based navigation.
- Key Steps:
- Initialize distances from start node to infinity, except start = 0.
Pick node with smallest tentative distance.
Update neighbors’ distances if a shorter path is found.
- Repeat until goal is reached.
- Initialize distances from start node to infinity, except start = 0.
- Pros: Guarantees shortest path.
- Cons: Computationally expensive for large graphs.
Diagram Idea:
B. A (A-Star) Algorithm*
- Purpose: Optimized version of Dijkstra using heuristics.
- Heuristic: Often Euclidean or Manhattan distance to goal.
Formula: f(n) = g(n) + h(n)
- Where g(n) = cost from start to node n, h(n) = estimated cost from n to goal.
- Pros: Faster than Dijkstra, finds optimal path.
- Cons: Heuristic choice impacts performance.
Practical Tip: A* is widely used in mobile robots, drones, and warehouse AGVs.
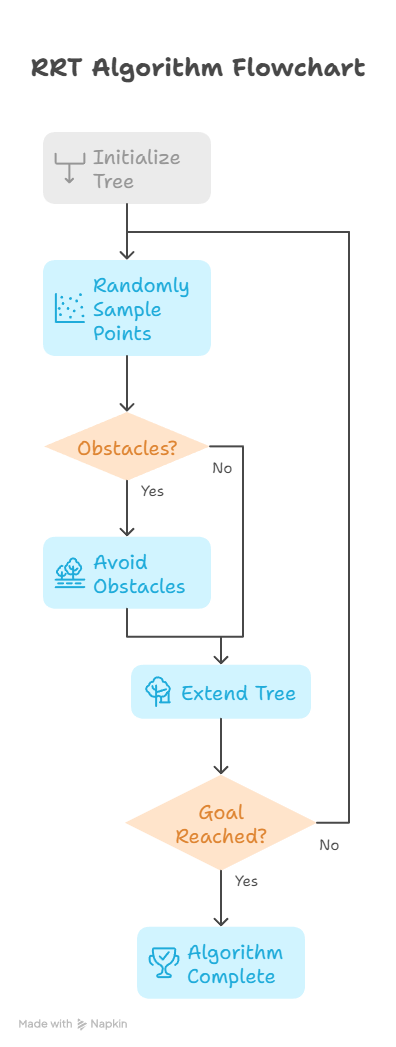
C. Rapidly-Exploring Random Tree (RRT)
- Purpose: Handles high-dimensional spaces and complex obstacles.
- Process:
- Initialize tree at start point.
Randomly sample points in space.
Extend tree toward sampled points while avoiding obstacles.
- Repeat until the goal is reached.
- Initialize tree at start point.
- Pros: Works well in high-dimensional environments.
- Cons: Path may be sub-optimal; smoothing required.
Diagram Idea:
D. Potential Field Method
- Purpose: Treats robot as a particle moving in a field with attractive forces toward goal and repulsive forces from obstacles.
Equation: F_total = F_attractive + F_repulsive
- Pros: Real-time path adjustment.
- Cons: May get stuck in local minima.
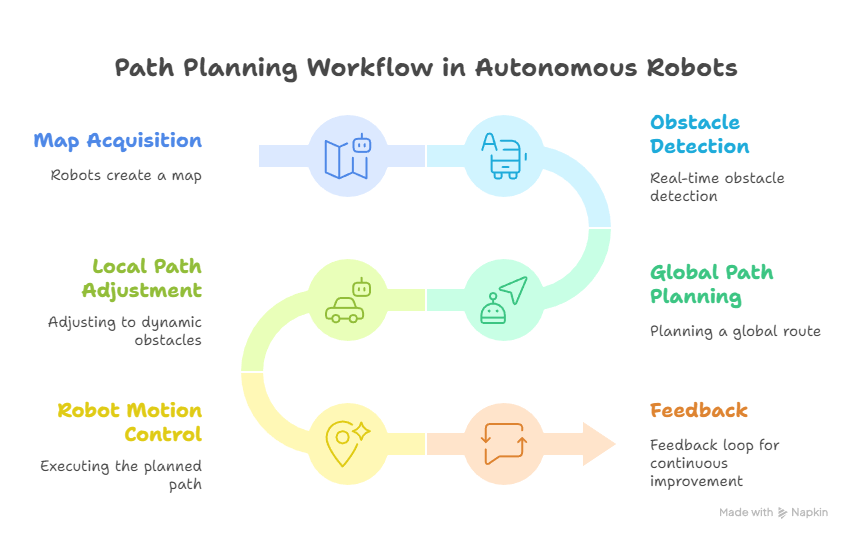
4. Workflow of Path Planning in Autonomous Robots
Map Acquisition → Obstacle Detection → Global Path Planning → Local Path Adjustment → Robot Motion Control → Feedback
Description:- Robots first create a map (offline or online), plan a global route, and adjust locally to avoid dynamic obstacles in real-time.
5. Integrating Path Planning with ROS
- Environment Setup: Use Gazebo to simulate robot and obstacles.
- Global Planner Node: Implement A* or Dijkstra using ROS navigation stack.
- Local Planner Node: Implement DWA or potential field algorithm for obstacle avoidance.
- Actuator Commands: Translate path into velocity and steering commands.
- Visualization: Use RViz to monitor planned path and robot movement.
Practical Tip: Curiosity Tech provides full ROS tutorials with navigation stack setup, obstacle detection, and simulation exercises.
6. Beginner Project Example
Objective: Simulate an autonomous mobile robot navigating a maze.
Components:
- Sensors: LiDAR and ultrasonic for obstacle detection.
- Controller Node: Path planner using A* algorithm.
- Actuators: Differential drive motors controlled via ROS.
- Outcome: Robot moves from start to goal while dynamically avoiding obstacles.
Project Table
| Step | Function/Node | Description |
| Map Loading | ROS Map Server | Load maze layout |
| Global Planning | A* Node | Compute initial optimal path |
| Local Planning | DWA Node | Adjust path for dynamic obstacles |
| Actuation | Motor Controller Node | Convert path into wheel velocities |
| Visualization | RViz | Display robot, path, and sensor data |
7. Tips for Mastering Path Planning
- Start with grid-based environments before progressing to continuous spaces.
- Understand trade-offs between optimality and computation time.
- Combine global and local planners for robust navigation.
- Use simulation platforms (Gazebo or V-REP) before implementing on real robots.
- Gradually integrate sensor fusion and SLAM for dynamic environments.
Conclusion
Path planning algorithms are the cornerstone of autonomous robotics, enabling robots to navigate efficiently and safely. From simple Dijkstra grids to complex RRT in high-dimensional spaces, mastering these algorithms prepares engineers to tackle real-world robotics challenges. Through CuriosityTech.in, learners gain access to practical tutorials, ROS integration examples, and project guidance that accelerate their journey from theoretical knowledge to practical expertise.